Our specialist knowledge and experience of safe working in confined spaces and at height started in 2007 when our founder, Steve Burdon was selected to research the subject, investigate current UK best practice within a variety of industries and present a way forward to the Aggregate Industries UK Executive Board. This intense 9-month project led to Steve’s subsequent employment with Rig Systems Ltd. – where he became a Lead Instructor.
A chance exchange of e-mails with an old friend in November 2012 led my professional career to take an unexpected turn when I was offered the opportunity to stand up and lead a professional Project Rescue Team on a mega construction project in Qatar. This has allowed me to not only develop my professional knowledge of confined space and working at height rescue but has given me the perfect opportunity to do things “for real” on a day to day basis.
So on the 1st January 2013 I flew into Qatar, and onto a mega construction project employing 28,000+ workers, well in excess of 300 low to high risk confined spaces, and steel erectors routinely working at heights of up to 56m. Welcome to the real world!
I then spent the first quarter of 2013 conducting Confined Space and Working at Height surveys on site, producing Rescue Risk Assessments and Procedures, and finally recruiting a rescue team. Procuring and importing the necessary rope rescue equipment, which wasn’t that easy in Qatar, was done at the same time, and finally planning a training programme for my rescue team, in preparation for them becoming fully operational on 1st April 2013.

It would be useful to chart here the evolution from concept to completion. The process started with myself and my appointed Rescue Team Supervisor conducting site surveys, both overtly and covertly, designed to observe working practices, whilst at the same time drawing together common access and egress issues across the whole site. We found that most areas were very difficult to access, with no obvious siting option for tripod placement, in order to negotiate vertical sections. Access hatches had not been designed with rescue in mind, and many would prohibit entry by a rescuer wearing full breathing apparatus, or the removal of an incapacitated worker.
Rescue is really a transportation issue, requiring the removal of a casualty from a place of danger or accident, to a place of care. Retrieval from the confined space, or at height, is only part of the problem. Using existing methods the casualty would then have to be transported from a considerable vertical height through narrow walkways, and down steep steps or monkey-ladders before finally reaching safety.

In order to institute an efficient and effective rapid response team I firstly had to assess the equipment requirements and then order the equipment for my team. Unfortunately, due to procurement procedures and local import customs, it was three months before the equipment arrived in Qatar.
The Project Rescue Team was recruited mainly from the Philippines. Even though the team came to me with little technical rescue capability, they all came with a wide range of skills. Some were members of rope and cave rescue teams or EMT’s and also, more importantly, most had an extensive knowledge of rope work, and a ready willingness to learn and they also knew all the knots used in rescue work, RESULT !!!! As I am left handed, teaching knot tying is not my strong suit.
At the beginning the team comprised a rescue lead and four rescuers, tasked as follows:
Rescue Lead – Commander
Rescue Operative / Climber – Safety Line Operator
Rescue Operative / Climber -Main Rescue Line Operator
Rescue Operative / Climber – Edge Man
Rescue Operative / Climber – Safety Zone Operator
If required, a trained Paramedic / Rescue Climber or an Emergency Responder from the site Medical Aid Centre would join the team.
Over the following months the team was expanded to a total of 11 members, which enables us to deliver a 24 hour 7 day rescue facility.
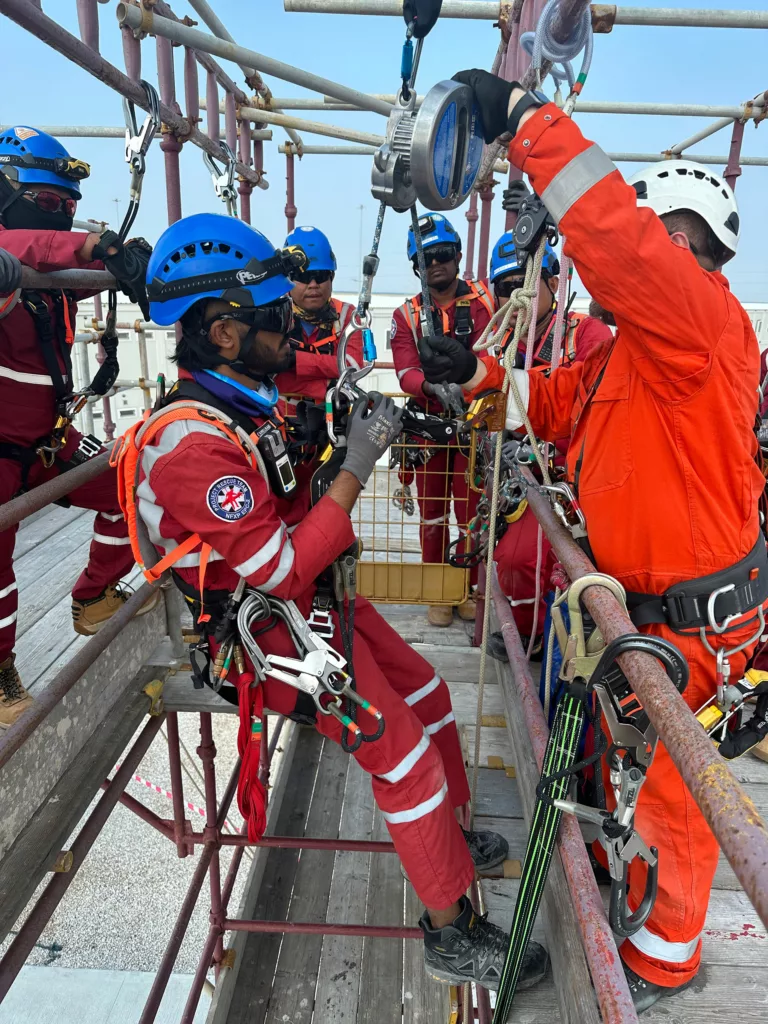
The team are equipped mainly with Petzl PPE :- Navaho Bod Harness, Vertex Vent Helmet, Pixa 3 Head Torch, 5m Grillon, Absorber Y Lanyard with NGO Hooks, 2 x 1.5m slings, 2 x Prussic Loops and Cordex Rigging Gloves.
The rescue team is divided into two rescue groups, both identically equipped in order to achieve vertical or horizontal access or egress and rescue, using directional anchors (tripods or steel structures).
Our main vertical confined space entry method is achieved using a CMC CSR 4:1 pulley system, and backup system (Petzl ASAP on an 11mm kernmantle rope). For those unfamiliar with the system, the CSR is a device from CMC, it is a pre-roved 4:1 high efficiency pulley block with an ingenious auto-block to capture progress or arrest a runaway load. The CSR has many advantages over the mechanical alternatives, including size, weight, and flexibility. For instance, you can change the throw of the block by changing the length of the rope, and low servicing requirements reduce the cost. This is a simple two rope system which will lower two rescuers into a restricted space without the need to disconnect either rescuer from the retrieval system. The confined space rescue system is designed to protect more than one rescuer in a confined space without leaving any one lone rescuer unattached at any time. In addition, all systems were configured to facilitate an immediate staged retrieval of multiple rescuers with casualties accommodated in fully flexible stretchers (Slix 100 Confined Space Stretcher).
Due to its small profile when fully chocked it was the obvious choice for use in spaces with minimum vertical clearance. It was also used as the “lifting / lowering ” machine to rapidly retrieve the last worker out, or lower a casualty to a place of safety. For horizontal and vertical raise or lowering of an IP or rescuer we selected the Petzl ID and 11mm kernmantle rope (blue rope), backed up by an identical safety system (safety rope red). Colour doesn’t make a great difference other than it prevents confusion in a live rescue situation.
We also needed to develop a protocol for the rescue of a fallen or suspended worker. It was decided that the use of a CMC clip stick (Sure Clip), which is a telescopic extendable pole with a clever karabiner clasp at the distal end, would be the ideal choice as it would enable the team to remotely clip the casualty. The stick would deliver the front end of a suck and draw rescue system, which could be used to cross haul the casualty back to the access point. For the lowering and lifting rescuers we use a Petzl ID and 11mm kernmantle rope with the backup system using Petzl ASAP on 11mm kernmantle rope. In a rescue from height scenario we opted to use the Titan Titanium Split-Apart Stretcher, which is light and very easy to use.
The final point was resolved very quickly when I asked if we could adapt the company’s working at height training tower, for use as a rescue training facility. Thankfully we managed to negotiate the required modifications, and within two days had a training tower which met all our needs, by having confined spaces, high anchors and cantilever scaffolds.
As for the training course programme; once the site rescue surveys were complete, the learning outcomes for the training modules were relatively easy to achieve and implement.
It might be worth remembering that I decided on a dog wagging the tail approach, that is work out what it was we needed to achieve capability-wise, and then build the programme around that, rather than shoe-horn a standard rope rescue programme into a predetermined time frame.
With one month to go before the operational start date of 1st April we were ready and equipped to start training.

All rescue team members attended the site induction and training programmes relevant to the operations being conducted in the construction area i.e.



If you have not experienced it the Qatari heat season is extreme to say the least, with temperatures rising to 55°c mixed with humidity of up to 100%. Both of which provides a very extreme working environment. One of the early priorities was the necessity for the team to get fit, acclimatised and the equipment to be protected from the environment.
As a Chartered Member of the UK Institute of Occupational Safety and Health, I also needed to determine how to reduce the risk of, and the need for, rescue. I developed a series of visit protocols in order to channel the Project Rescue Team into visiting critical confined spaces and work at height tasks. The purpose of these protocols was to minimise the risk of injury to persons undertaking work activities in confined spaces and to establish a daily review process of the planned and live confined space activities through the permit to work system. Providing advice to the construction department on confined space working methods and establishing confined space rescue protocols were an additional task.
Since these protocols were initiated, the Project Rescue Team has visited over 2200 confined spaces and working at height tasks, and talked to 2300 construction supervisors and workers about safe working in potentially hazardous situations. This, for the Project Rescue Team, is very rewarding.
To further test our mettle we were tasked to develop a rescue system to support the construction of a 153m steel tower. The main problem was that we did not have the use of a spare crane that could lift rescuers mechanically to 153m, as was the unavailability of high anchors, and how to rig the rescue ropes onto the steel tower which was being constructed in 20m sections on the ground, and then craned into position. The high anchor problem was solved by rigging three 10 tonne lifting slings to the tower section being constructed on the ground. When the sections were lifted into position the rescue riggers were presented with the high anchor.
These anchors were rigged with “Kootenay Pulleys” rigged on two of the outside anchors and an ID on the middle anchor. The rescue plan was based around mechanically hauling two rescuers to the casualty. This was achieved by a capstan winch pulling a rope through a progress capture device, the “CMC Multi-Purpose Descender, MPD”. For those not familiar with the MPD, it is a high-efficiency pulley with an integral rope grab mechanism. This allows it to be used as a lowering device on the main line and belay line systems, and be quickly changed over to a raising system without switching off or replacing any hardware.
So, with a P50 Rescue Pulley installed at the base of the tower, we had our hauling system. A Capstan winch…..through a MPD….through a P50….up to the Kootenay and back down to the attachment point for the rescuer. The back-up system is an ASAP line running through the middle of the two rescue ropes. The ID rigged at the top of the tower allows for the system to be lowered in the event of a “hook-up” or emergency.
Using this method we could raise a rescuer at 12m per minute, and once the casualty had been packaged, the stretcher and tender could be lowered without needing to re-rig the system.
In summary, the 1st April 2013 was the defining point in my, or more accurately our journey, as I just head the small group of newly qualified rope rescue team members, who have been formed into a close-knit, effective, operational rescue team. Their training development involving technical rescue is difficult at best, it involves a huge commitment by the client, the allocation of costly resources, and the potential for distraction away from the core business, and many cultural obstacles and difficulties which can only be addressed by strong unswerving leadership.
Since becoming an operational team we have conducted twelve rope rescues from height – most of these rescue were conducted in the Qatari heat season. Not one of these rescues was for a fallen or trapped casualty, all were incapacitated or sick workers who needed removal to the waiting ambulance. Some of these workers were at 40m, and some were found in really difficult areas, in which only a flexible rope rescue system could work, and all were successfully delivered to the ambulance within 40 minutes of the emergency call being received by the team.